简短标语简短标语
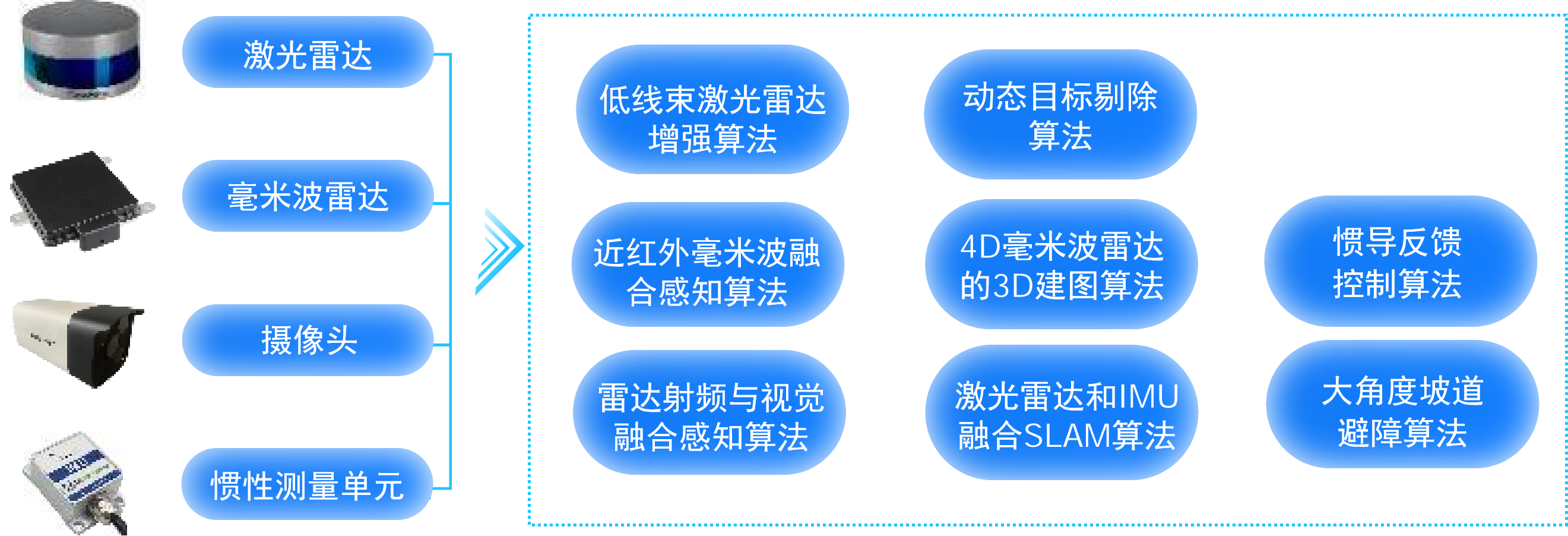
集成多种传感器技术和先进智能算法
涵盖通信、人工智能、自动驾驶等多学科,形成高效协同
构建由博士、硕士、本科生、留学生组成的多层次人才梯队
紧贴实际,成员分工明确,贯通仿真建模、算法研发与实车测试全流程
本款无人驱鸟胶轮车采用四轮差速底盘结构,转弯半径为零,可原地掉头,最高自动驾驶时速 18km/h,
产品基于 ROS 开发框架,搭载 SLAM 定位建图技术,可自主完成厂区地图建模、全区域自主导航;